Micro:bit(maqueen)
micro:bit関連オプションキット「DFRobot社(中国上海)のmicro:Maqueen」二輪ロボットカーを紹介します。ここでは「micro:Maqueen
V4.1」とmicro:bitV2の組み合わせでMakeCodeでプログラミングしました。
micro:Maqueenの概要
仕様
- 金属製ギヤボックス+DCモーターで安定した走行 が出来ます。
- 超音波センサー により障害物を検知しての自動運転が出来ます。
- ラインセンサーのライントラッキング機能を使って、黒い路線上での自動運転が出来ます。
また連動のインジケーターLED搭載で動作確認が容易です。
- 赤色LEDやフルカラーLED・スピーカーなど出力装置を搭載しており、色々な活用出来ます。
- 赤外線リモコン受信センサーにより、赤外線リモコンデータを学習して、リモコン操作が出来ます。
- .Gravityシリーズ準拠GPIOコネクタやサーボコネクタ搭載 しており、色々なデバイスの接続が出来ます。
- 単4電池×3本の他、オプションの充電池ボードにも対応 しております。
搭載部品の名称
maqueenの前
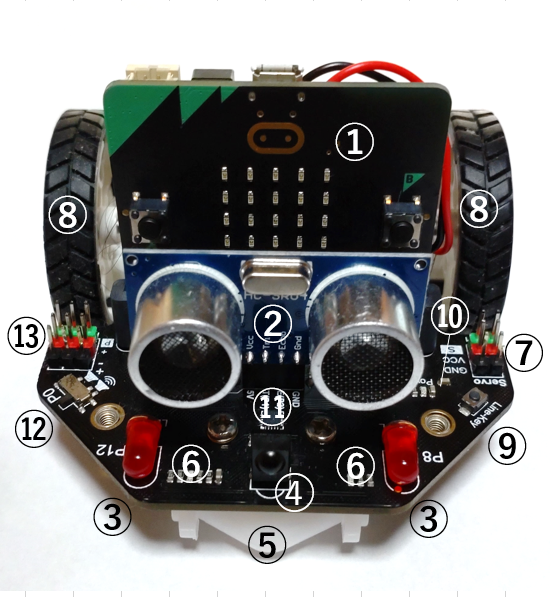
①micro:bit ②超音波センサー ③LED
➃赤外線受光部 ⑤前部ローラ
⑥ラインセンサーインジケーター
⑦サーボコネクター
⑧ホイール ⑨LINE Key ⑩電源LED ⑪I2C端子
⑫P0切替スイッチ ⑬GPIO端子
maqueenの裏

①前部ローラー ②フルカラーLED
③ラインセンサー➃GPIO端子(ワニ口対応)
⑤ホイール
maqueenの裏
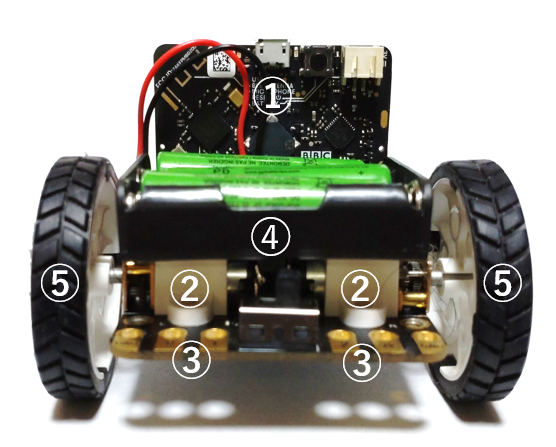
①Micro:bit ②ギヤ付きモーター
③GPIO(ワニ口対応) ➃電池ホルダー ⑤ホイール
GPIO対応表
| micro:bit |
micro:Maqueen v4.0 |
備 考 |
| P0 |
内蔵スピーカー/GPIO |
スイッチでスピーカーON/OFF |
| P1 |
超音波センサー(Trig)/GPIO |
GPIOコネクタとの同時使用不可
Gravity拡張インタフェース
GPIO拡張ポート(p1、p2 ) |
| P2 |
超音波センサー(Echo)/GPIO |
| P8 |
左LED |
赤色LED |
| P12 |
右LED |
| P13 |
左ラインセンサー |
インジケーターLED付 |
| P14 |
右ラインセンサー |
| P15 |
フルカラーLED |
NeoPixel、1600万色 |
| P16 |
赤外線受信モジュール |
|
| P19/20 |
I2C(SCL/SDA) |
モーター・サーボ制御等に使用
サーボポート S1、S2
|
micro:Maqueen アプリケーション
アプリケーションの実行動画とプログラムのサンプルを掲載します。
プログラムはMakeCodeブロックのurlをクリックするとサンプルプログラムが表示されます。
画面右上の編集をクリックするとプログラムの変更が出来ます。
プログラムの書込みはダウンロードボタンでプログラムをダウンロードして、USBケーブル経由でmicro:bitに書き込んでください。
またWebUSB指定(connect device選択して接続する)で、Webブラウザから直接書き込みもできます。
モーターコントロール
マイクロマクイーンのギアモーターをコントロール(
前進、左旋回、右旋回、後退、左回転、右回転)します。
MakeCodeブロック:maq-motor
RGB LED点灯
RGB LEDを色々な色で点灯します。
タッチセンサーをタッチするごとに、以下の表示をします。
・色相指定で360色の色を出します。
・ランダムで1600色の色を出します。
・光の基本色せある赤・青・緑色を出してLED表示を切り替えます。
MakeCodeブロック:maq-led
自動運転(ライントラッキング)
ライントラッキング機能を使って、黒い路線が書かれている
マップの上で自律的に運転します。
MakeCodeブロック:maq-line
自動運転(超音波による障害物の回避)
超音波距離センサーを使って、前の障害物を検知し
障害物を回避して自律的に運転します。
MakeCodeブロック:maq-onpa
自動運転(光検知)
光を検知し、明るさを検知した時に前方に進行して、
光検知なしの場合はその場で回転して、光検知位置を探します。
MakeCodeブロック:maq-hikari
赤外線リモコンでの車体コントロール
家電製品に使われている赤外線リモコンでそれぞれのボタン操作情報を取得して、
その情報を使ってプログラミングします。
その赤外線リモコン操作で、前進、後退、左右旋回します。
MakeCodeブロック:maq-infrared、参考で赤外線リモコンコードの取得:maq-infrared-red
無線リモコン(ボタン)
Micro:bit無線リモコンのボタン操作(Aボタン、Bボタンの押下)により、
ギアモーターをコントロール(前進、左旋回、右旋回)します。
MakeCodeブロック:リモコン maq-musen-rc 、マイクロマクイーン
maq-musen-motor
無線リモコン(モーションセンサー)
Micro:bit無線リモコンのモーションセンサー操作(Y方向の傾きで前進・後退、
X方向の傾きで左右旋回)により、
ギアモーターをコントロール(前進、後退、左旋回、右旋回)します。
MakeCodeブロック:リモコン maq-musen2-rc 、マイクロマクイーン
maq-musen2-maq